Python-pcl 随机采样一致性算法
本文共 4563 字,大约阅读时间需要 15 分钟。
RANSAC 随机采样一致性算法
RANSAC是一种随机参数估计算法。RANSAC从样本中随机抽选出一个样本子集,使用最小方差估计算法对这个子集计算模型参数,然后计算所有样本与该模型的偏差,在使用一个预先设定好的阈值与偏差比较,当偏差小于阈值时,该样本点属于模型内样本点(inliers),简称局内点或内点。否则为模型外样本点(outliers)。
然后迭代,取inliers的个数最多的作为结果返回;
PCL中Sample_Consensus支持的几种几何模型有:
- SACMODEL_PLANE:平面模型
- SACMODEL_LINE:直线模型
- SACMODEL_CIRCLE2D:二维圆的圆周模型
- SACMODEL_SPHERE:三维球体模型
- SACMODEL_CYLINDER:圆柱体模型
- SACMODEL_CONE:圆锥模型,尚未实现
- SACMODEL_TORUS: 圆环面模型,尚未实现
- SACMODEL_PARALLEL_LINE:有条件的直线模型,直线模型与给定轴线平行
- SACMODEL_PERPENDICULAR_PLANE:有条件限制的平面模型,平面模型与给定轴线垂直
- SACMODEL_NORMAL_PLANE: 有条件限制的平面模型,第一个局内点的发现必须与估计的平面模型的法线平行
- SACMODEL_PARALLEL_PLANE: 有条件限制的平明模型 在规定的最大角度偏差限制下,平面模型与给定的轴线平行
- SACMODEL_NORMAL_PARLLEL_PLANE:有条件限制的平面模型 三维平面模型与用户设定的轴线平行
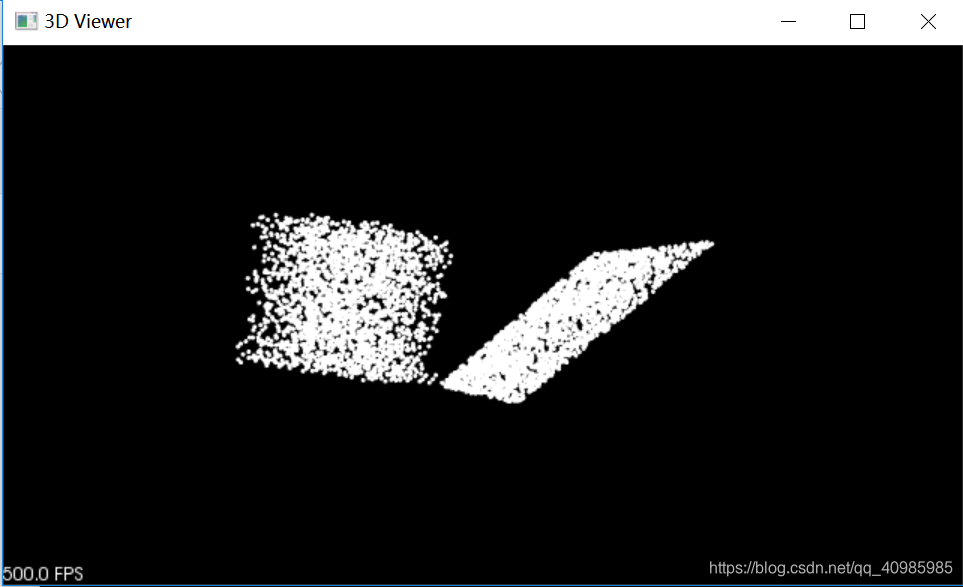
下边的例子演示了
无参数时原始点云平面内点与立方体外点 参数为-f 提取得到的平面上的内点 参数为-s 提取得到圆球内点与立方体外点 参数为 -sf 提取圆球上的点为内点
无参数
 参数为-f
参数为-f 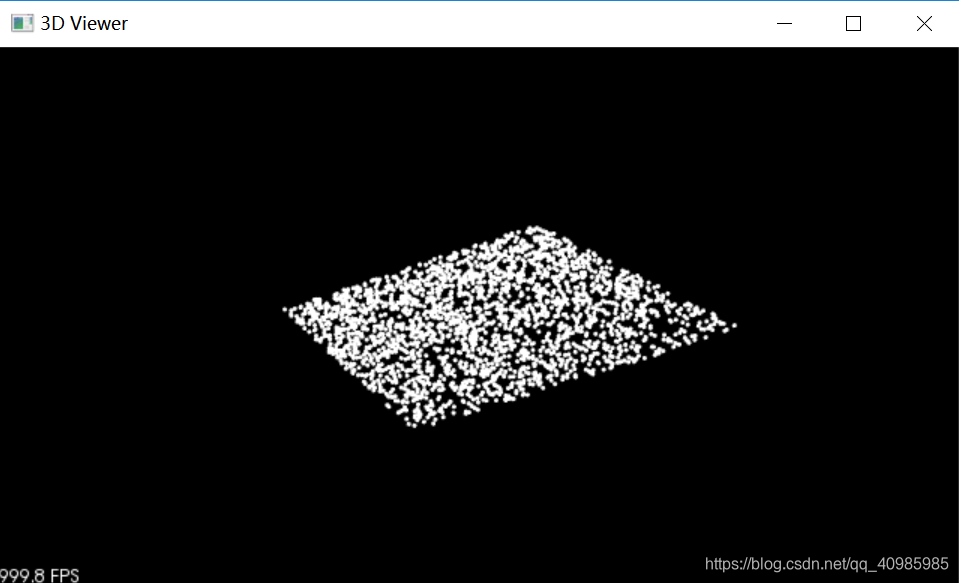
参数为-s
 参数为-sf
参数为-sf 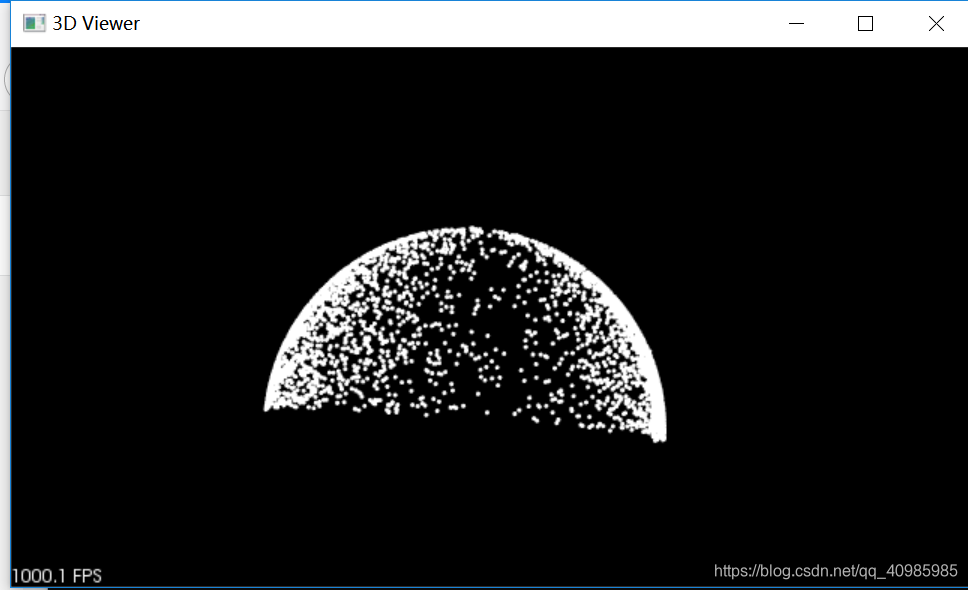
# -*- coding: utf-8 -*-# How to use Random Sample Consensus model# http://pointclouds.org/documentation/tutorials/random_sample_consensus.php#random-sample-consensusimport numpy as npimport randomimport pcl.pcl_visualizationimport mathimport sysargvs = sys.argv # for random model# argvs = '-f' # plane model# argvs = '-sf' # sphere modelargc = len(argvs) # 参数个数print(argc)print('argvs: ',argvs)# 初始化点云cloud = pcl.PointCloud()final = pcl.PointCloud()points = np.zeros((5000, 3), dtype=np.float32)RAND_MAX = 1024for i in range(0, 5000): if argc > 1: if argvs[1] == "-s" or argvs[1] == "-sf": points[i][0] = 1024 * random.random() / (RAND_MAX + 1.0) points[i][1] = 1024 * random.random() / (RAND_MAX + 1.0) if i % 5 == 0: points[i][2] = 1024 * random.random() / (RAND_MAX + 1.0) elif i % 2 == 0: points[i][2] = math.sqrt(math.fabs(1 - (points[i][0] * points[i][0]) - (points[i][1] * points[i][1]))) else: points[i][2] = -1 * math.sqrt( math.fabs(1 - (points[i][0] * points[i][0]) - (points[i][1] * points[i][1]))) else: points[i][0] = 1024 * random.random() / RAND_MAX points[i][1] = 1024 * random.random() / RAND_MAX if i % 2 == 0: points[i][2] = 1024 * random.random() / RAND_MAX else: points[i][2] = -1 * (points[i][0] + points[i][1]) else: points[i][0] = 1024 * random.random() / RAND_MAX points[i][1] = 1024 * random.random() / RAND_MAX if i % 2 == 0: points[i][2] = 1024 * random.random() / RAND_MAX else: points[i][2] = -1 * (points[i][0] + points[i][1])cloud.from_array(points)model_s = pcl.SampleConsensusModelSphere(cloud)model_p = pcl.SampleConsensusModelPlane(cloud)if argc > 1: if argvs[1] == "-f": ransac = pcl.RandomSampleConsensus(model_p) ransac.set_DistanceThreshold(.01) ransac.computeModel() inliers = ransac.get_Inliers() elif argvs[1] == "-sf": ransac = pcl.RandomSampleConsensus(model_s) ransac.set_DistanceThreshold(.01) ransac.computeModel() inliers = ransac.get_Inliers() else: inliers = []else: inliers = []print(str(len(inliers)))if len(inliers) != 0: finalpoints = np.zeros((len(inliers), 3), dtype=np.float32) for i in range(0, len(inliers)): finalpoints[i][0] = cloud[inliers[i]][0] finalpoints[i][1] = cloud[inliers[i]][1] finalpoints[i][2] = cloud[inliers[i]][2] final.from_array(finalpoints)isWindows = Trueif isWindows == True: if argc > 1: if argvs[1] == "-f" or argvs[1] == "-sf": viewer = pcl.pcl_visualization.PCLVisualizering('3D Viewer') viewer.SetBackgroundColor(0, 0, 0) viewer.AddPointCloud(final, b'inliers cloud') viewer.SetPointCloudRenderingProperties(pcl.pcl_visualization.PCLVISUALIZER_POINT_SIZE, 3, b'inliers cloud') viewer.InitCameraParameters() else: viewer = pcl.pcl_visualization.PCLVisualizering('3D Viewer') viewer.SetBackgroundColor(0, 0, 0) viewer.AddPointCloud(cloud, b'sample cloud') viewer.SetPointCloudRenderingProperties(pcl.pcl_visualization.PCLVISUALIZER_POINT_SIZE, 3, b'sample cloud') viewer.InitCameraParameters() else: viewer = pcl.pcl_visualization.PCLVisualizering('3D Viewer') viewer.SetBackgroundColor(0, 0, 0) viewer.AddPointCloud(cloud, b'sample cloud') viewer.SetPointCloudRenderingProperties(pcl.pcl_visualization.PCLVISUALIZER_POINT_SIZE, 3, b'sample cloud') viewer.InitCameraParameters() while viewer.WasStopped() != True: viewer.SpinOnce(100)else: pass 转载地址:http://sxai.baihongyu.com/
你可能感兴趣的文章
Mysql索引底层结构的分析
查看>>
Mysql索引总结
查看>>
Mysql缓存调优的基本知识(附Demo)
查看>>
mysql自增id超大问题查询
查看>>
MySQL获取分组后的TOP 1和TOP N记录
查看>>
MySQL视图
查看>>
MySQL设置远程连接
查看>>
Mysql账号权限查询(grants)
查看>>
MySQL迁移到达梦:如何轻松、高质量完成迁移任务
查看>>
mysql还有哪些自带的函数呢?别到处找了,看这个就够了。
查看>>
mysql进阶 with-as 性能调优
查看>>
Mysql连接时报时区错误
查看>>
MYSQL遇到Deadlock found when trying to get lock,解决方案
查看>>
mysql部署错误
查看>>
MySQL锁与脏读、不可重复读、幻读详解
查看>>
mysql锁机制,主从复制
查看>>
Mysql锁机制,行锁表锁
查看>>
MySQL错误提示mysql Statement violates GTID consistency
查看>>
MySQL集群解决方案(4):负载均衡
查看>>
mysql面试题学校三表查询_mysql三表查询分组后取每组最大值,mysql面试题。
查看>>